学生课堂台
演示模式已开启
演示模式不会写入课堂状态。
第 01 页
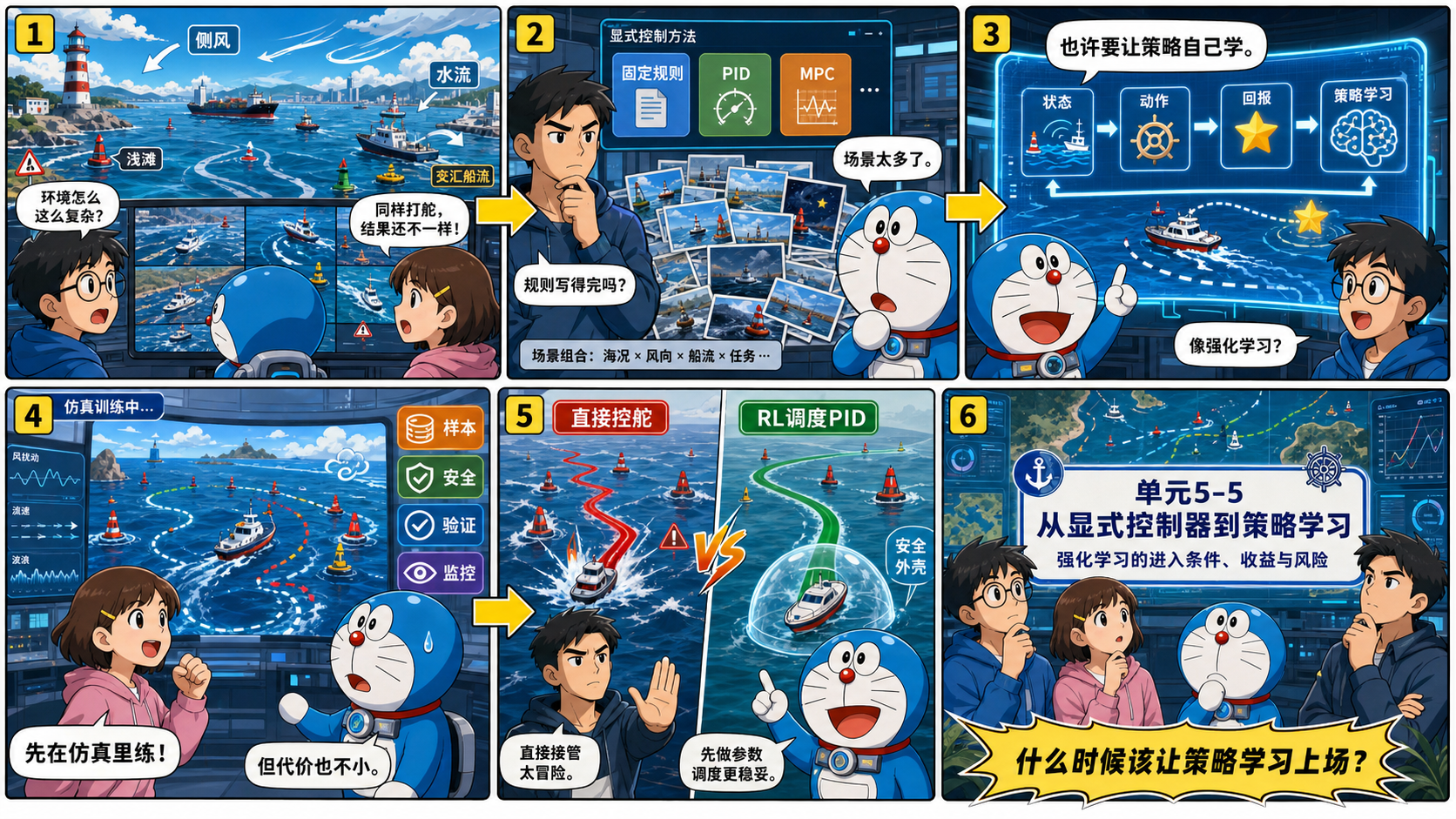
策略学习进入控制问题的导入场景
从复杂航行情境进入策略学习的入口条件和工程责任判断。
复杂航行中的策略学习入口
一艘自主船在静水中靠 PID 能保持航向,但在侧风、横流、对象参数漂移和传感器噪声下需要频繁重新整定。此时应让策略学习直接接管舵机,还是先判断它能承担哪一层职责。
显式控制律与策略学习导入漫画
控制责任收束
本课讨论强化学习的合法入口,不讨论用前沿方法绕开控制目标、执行约束和工程责任。
已提交 0 个页面作答。
加载中...
从复杂航行情境进入策略学习的入口条件和工程责任判断。