学生课堂台
演示模式已开启
演示模式不会写入课堂状态。
结构选型判断链
主矛盾
结构语义
收益与代价
第 01 页
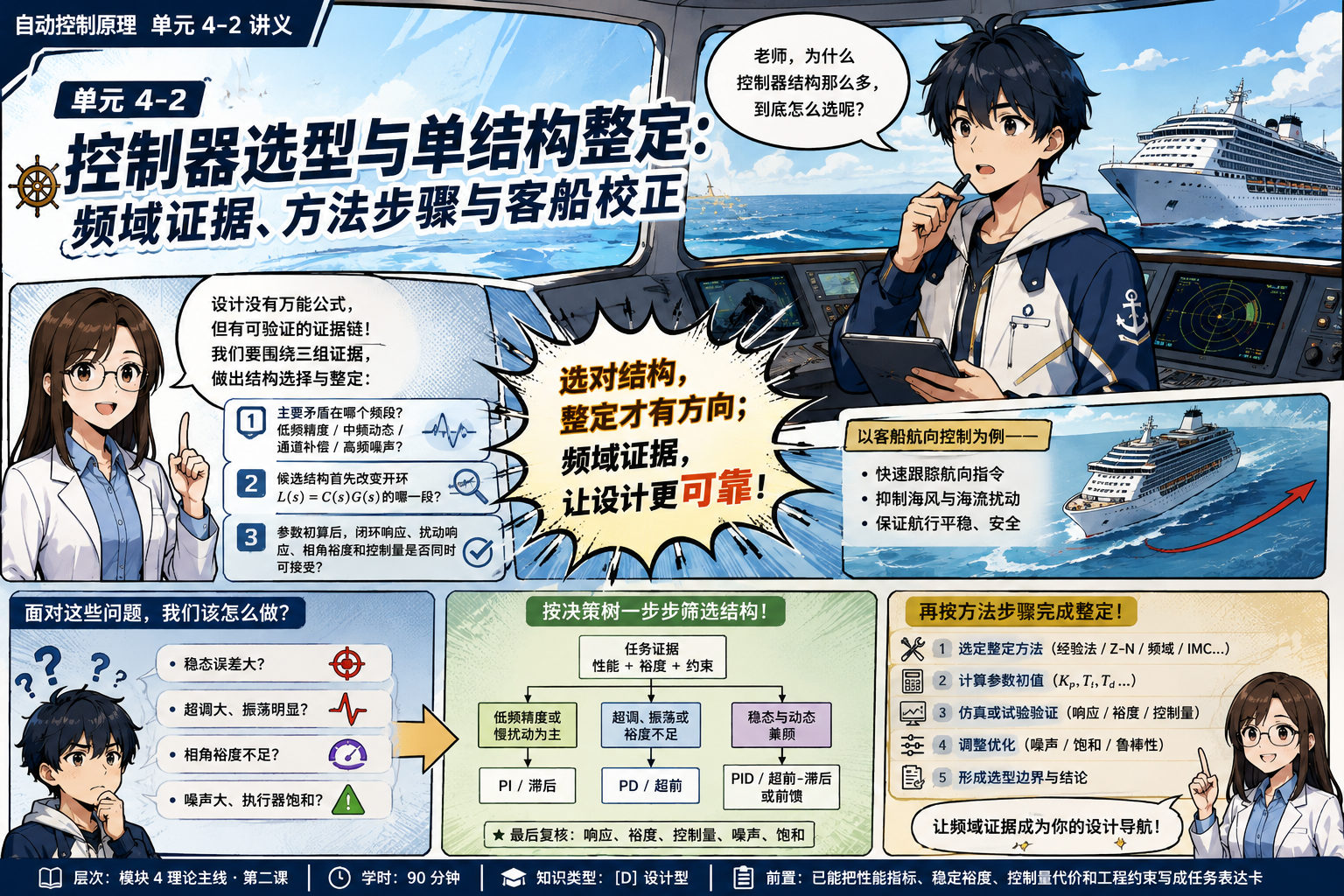
控制器选型与整定任务的导入场景
用场景问题引出结构选型和单结构整定。
学习内容
客船航向控制已经写出超调、相角裕度、慢扰动和控制量约束,首轮控制器为什么不能直接写成 PID。
任务表达卡已经给出证据,工程师必须先判断主要矛盾属于低频精度、中频动态、通道补偿,还是高频噪声与执行器边界。
- 任务表达卡已经给出证据,工程师必须先判断主要矛盾属于低频精度、中频动态、通道补偿,还是高频噪声与执行器边界。
学习内容
本课要把结构名称改写为频域作用点、参数初算步骤和多指标复核链。